
NOTA: Si quieres una explicación más detallada de cómo controlar motores con Pinguino consulta el tutorial correspondiente
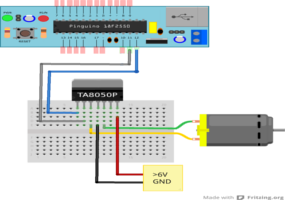
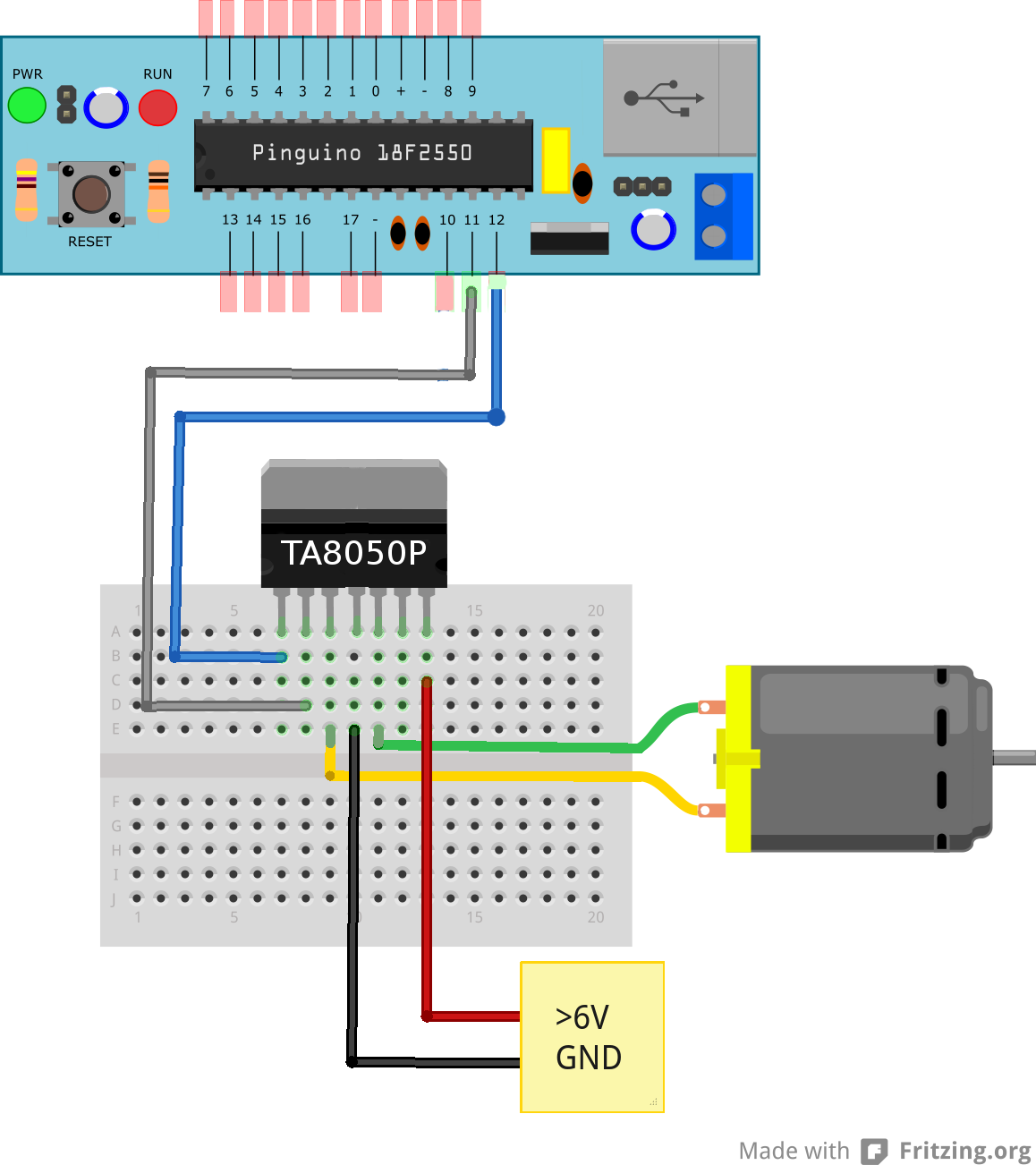
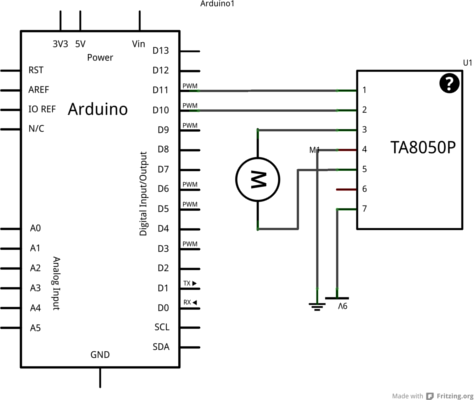
Este driver unicamente puede controlar un motor, lo que haremos será conectar sus dos patas de control a los dos pines PWM de Pinguino, lo que nos permitirá controlar la velocidad de giro del motor en ambos sentidos de la marcha.
Unicamente necesitamos un programa que sepa gobernar este motor:
void setup(){
pinMode(11,OUTPUT);
pinMode(12,OUTPUT);
}
void loop(){
//giro en un sentido
digitalWrite(11,HIGH);
digitalWrite(12,LOW);
delay(2000);
//gira en el otro sentido
digitalWrite(11,LOW);
digitalWrite(12,HIGH);
delay(2000);
//para el giro motor
digitalWrite(11,LOW);
digitalWrite(12,LOW);
delay(2000);
//acelerar
for(i=0; i<=255; i++){
analogWrite(11, i);
}
//decelerar
for(i=255; i>0; i--){
analogWrite(11, i);
}
//acelerar en sentido inverso
for(i=0; i<=255; i++){
analogWrite(12, i);
}
//decelerar en sentido inverso
for(i=255; i>0; i--){
analogWrite(12, i);
}
}
Lo que hará el programa será incrementar la velocidad desde 0 hasta el máximo y despues decrementarla hasta parar y comenzar a hacer lo mismo en sentido opuesto.
