
Nota: Si quieres información detallada sobre el control de motores PaP con pinguino, visita este tutorial
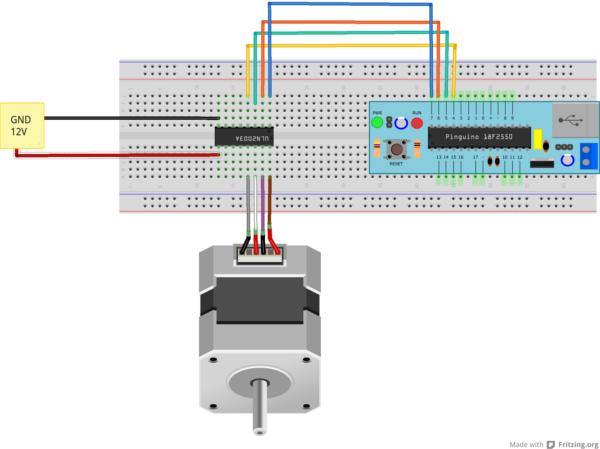
El circuito que necesitamos montar para controlar un motor PaP es muy simple, se basa en el driver ULN2003A y es rl siguiente:
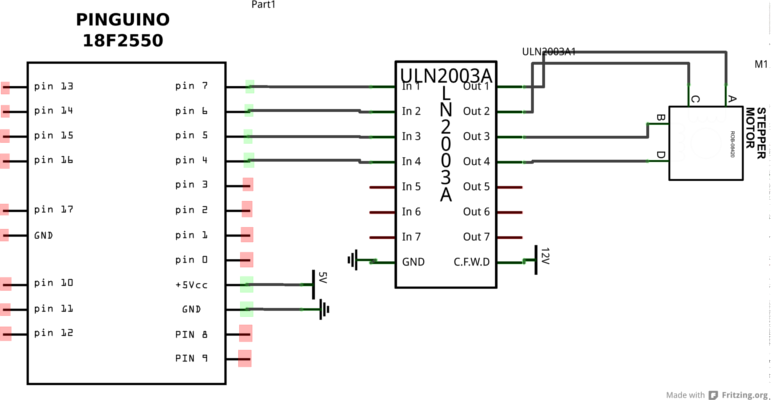
Ahora necesitamos cargar un programa en Pinguino que nos permita controlar el motor:
//Creamos una función que sepa generar la secuencia de pulsos:
void paso(int a, int b, int c, int d, int pause){
digitalWrite(7,a);
digitalWrite(6,b);
digitalWrite(5,c);
digitalWrite(4,d);
delay(pause);
}
void setup(){
//Configuramos los pines conectados al motor como salidas
pinMode(7,OUTPUT);
pinMode(6,OUTPUT);
pinMode(5,OUTPUT);
pinMode(4,OUTPUT);
}
void loop(){
/*Ahora unicamente tenemos que llamar a la función
enviando los parametros para mover el motor.*/
/*El ultimo valor es simplemente una pausa para dar tiempo
al motor a dar un paso antes de enviarle la siguiente orden*/
paso(1,0,0,0,15);
paso(1,1,0,0,15);
paso(0,1,0,0,15);
paso(0,1,1,0,15);
paso(0,0,1,0,15);
paso(0,0,1,1,15);
paso(0,0,0,1,15);
paso(1,0,0,1,15);
/*Ahora podemos invertir el movimiento,
simplemente invirtiendo la secuencia: */
paso(1,0,0,1,15);
paso(0,0,0,1,15);
paso(0,0,1,1,15);
paso(0,0,1,0,15);
paso(0,1,1,0,15);
paso(0,1,0,0,15);
paso(1,1,0,0,15);
paso(1,0,0,0,15);
}
