
Veamos lo sencillo que es controlar un motor de paso a paso con Arduino.
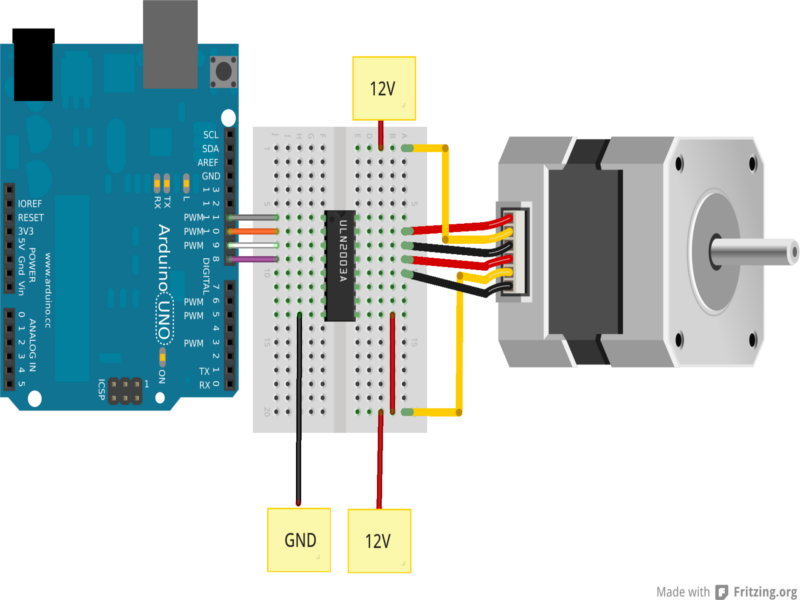
Para ello, además del Arduino y el motor paso a paso necesitaremos un driver que haga de intermediario entre el voltaje y la tensión que es capaz de suministrar Arduino y lo que el motor necesita.En este caso hemos utilizado un ULN2003A

// pines a los que esta conectado el Motor
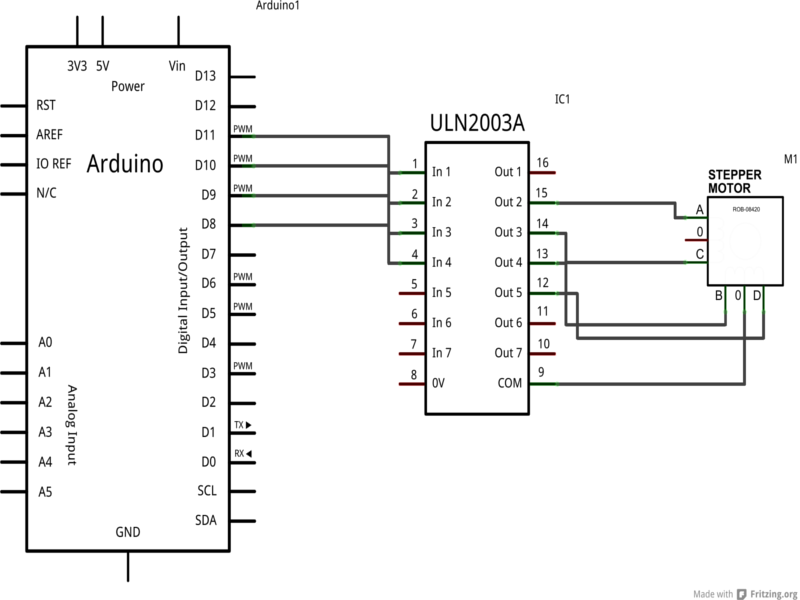
int motorPin1 = 11;
int motorPin2 = 9;
int motorPin3 = 10;
int motorPin4 = 8;
//Delay que determina la velocidad de giro
int delayTime = 500;
void setup() {
//Configuramos todos los pines como salidas
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop() {
//comenzamos la secuencia que hace que el motor se mueva
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay(delayTime);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay(delayTime);
}
