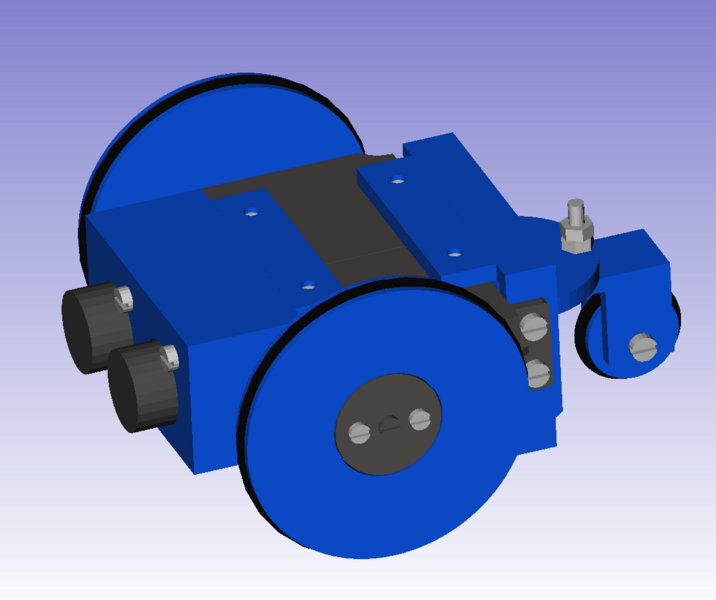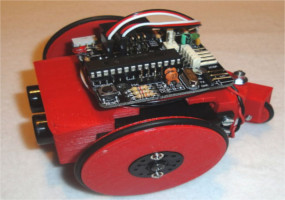

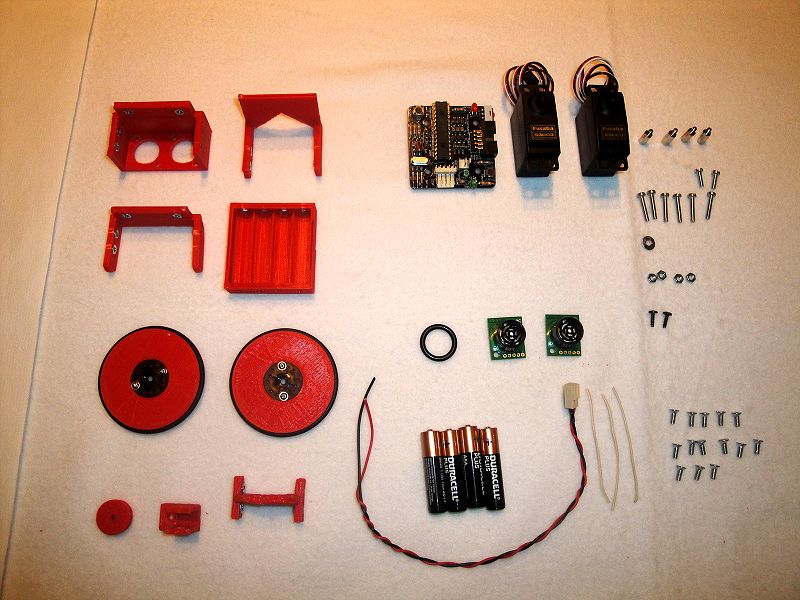
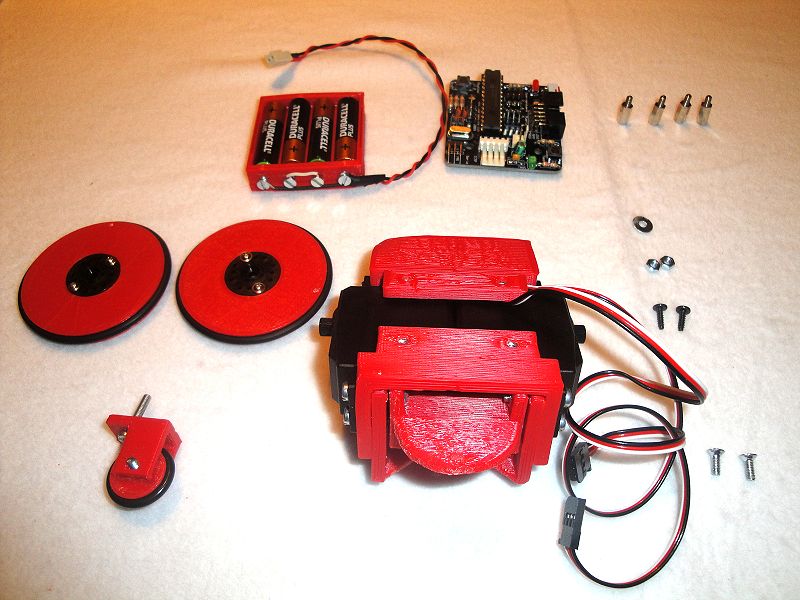
El Miniskybot-v1.0 es un robot móvil imprimible totalmente funcional. Incorpora dos motores, dos sensores de ultrasonidos y un microcontrolador. Es un robot perfecto para iniciase en el mundo de la robótica.
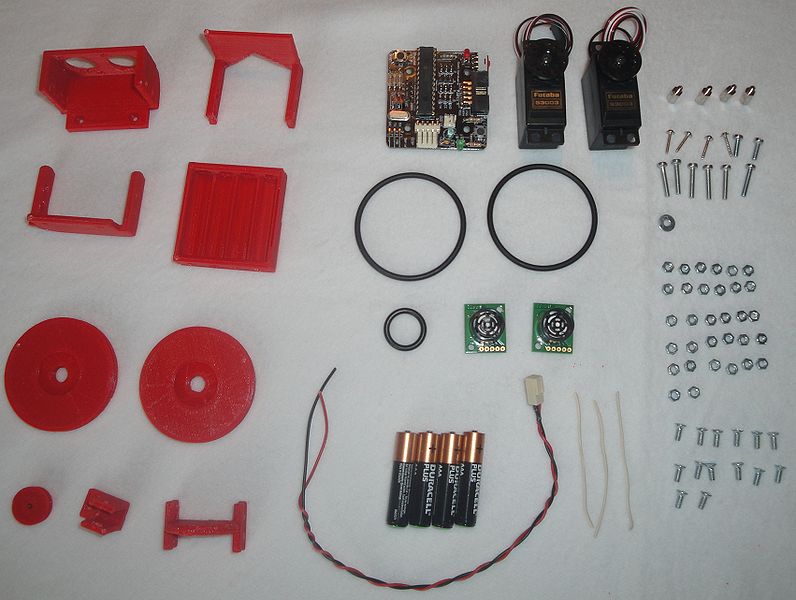
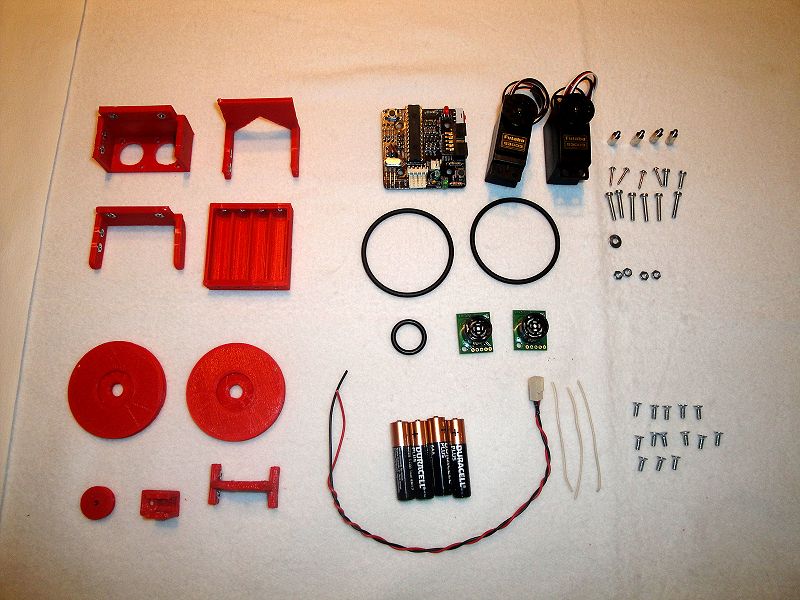
Materiales
|
|
 Piezas en STL para ser impresas
Piezas en STL para ser impresas
Proyecto completo. Fuentes de las piezas (openscad), ficheros STL, software y diseño en Freecad
Montaje

| Imagen | Descripción |
|---|---|
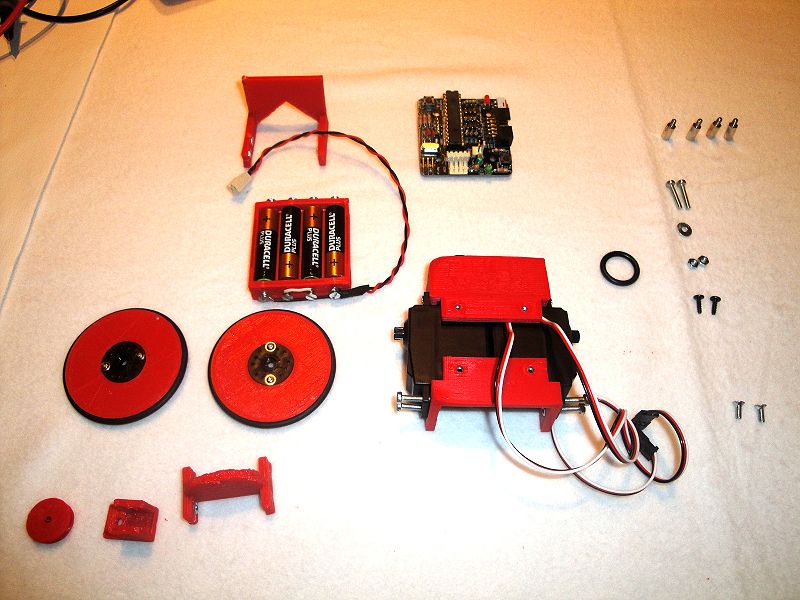
 |
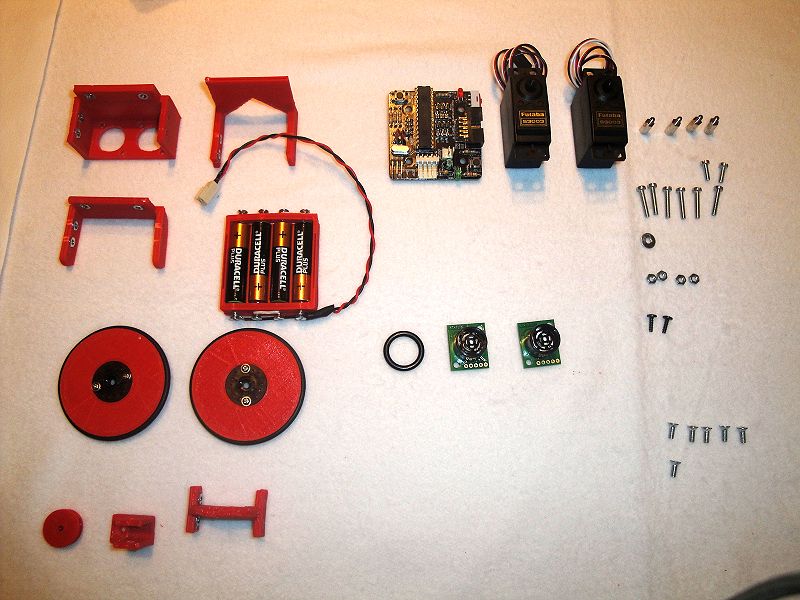
Insertar 30 tuercas en sus correspondientes huecos en las piezas imprimibles. Para ello seguir las instrucciones de las Montaje de las piezas con tuercas empotradas |
 |
Montar las ruedas. Seguir estas instrucciones |
 |
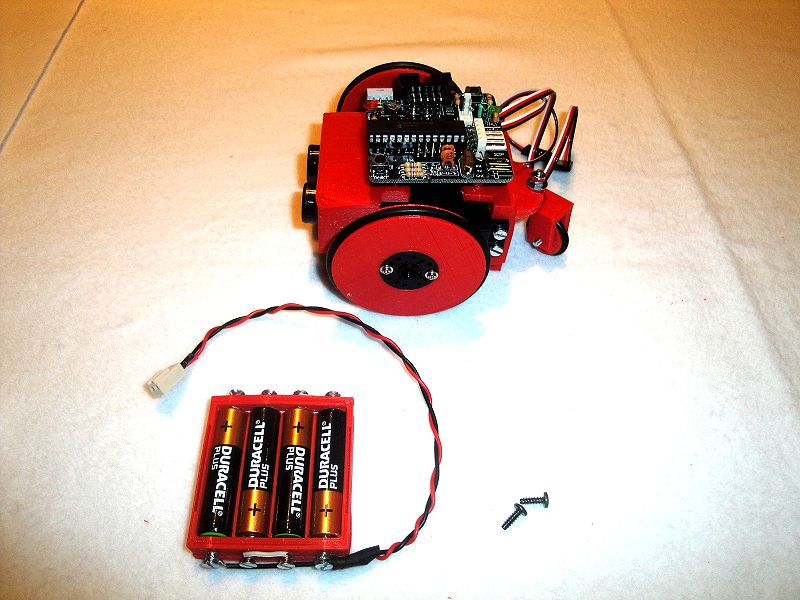
Montar el portapilas. Seguir estas instrucciones |
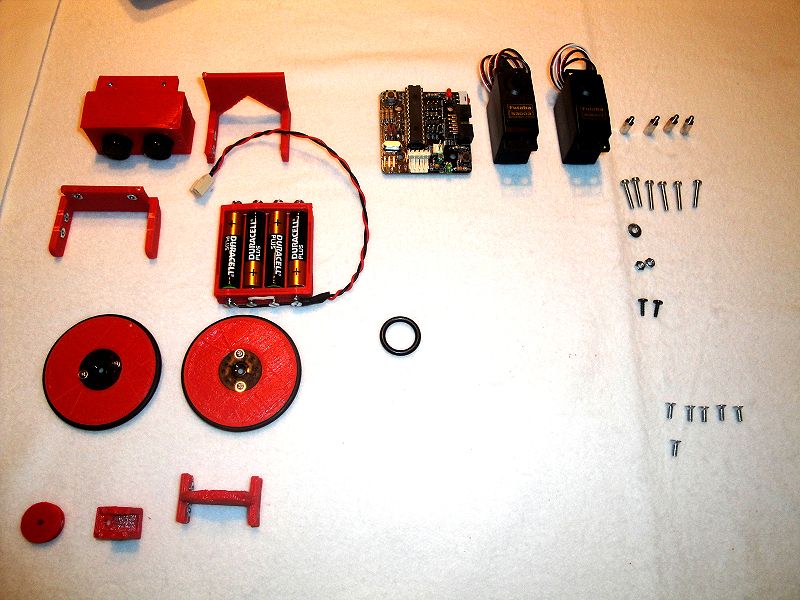 |
Insertar los sensores de ultrasonidos en la pieza frontal |
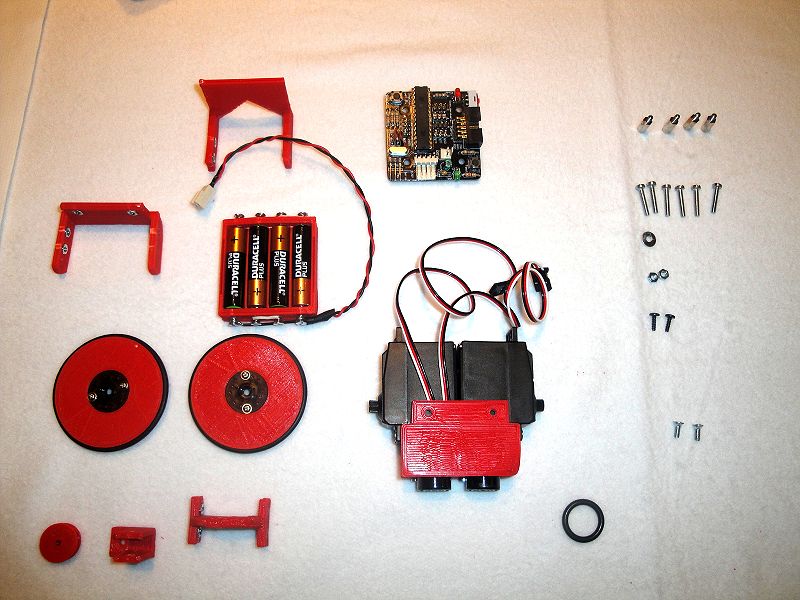 |
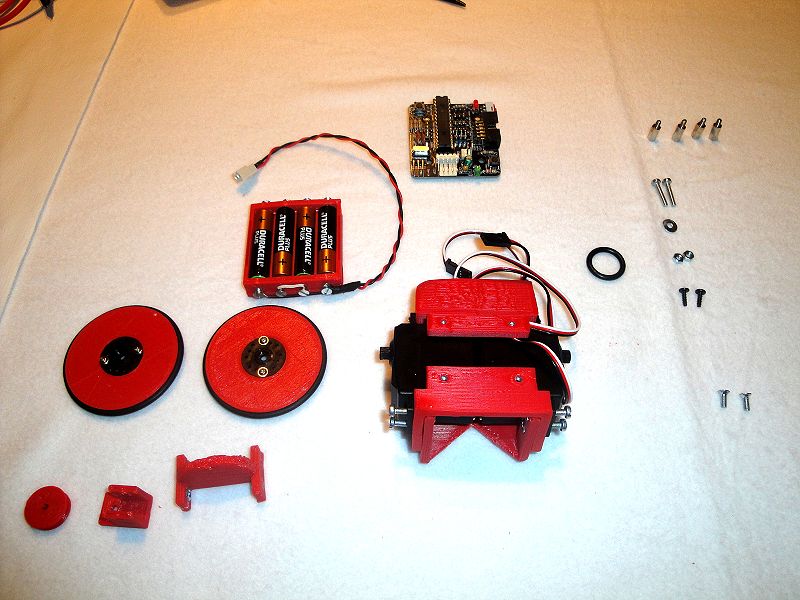
Unir los dos servos como se indica en la figura y atornillar la parte frontal del robot (la que tiene los dos sensores) |
 |
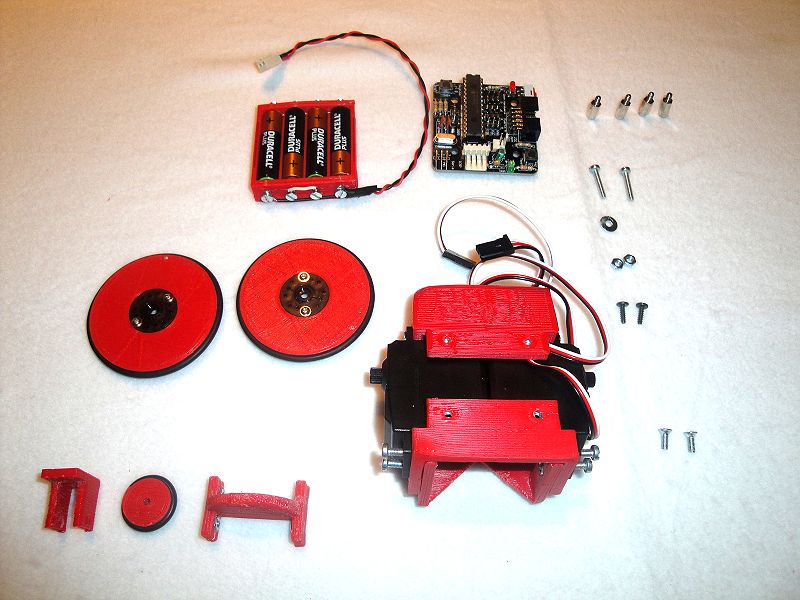
Colocar la pieza trasera. Usar 4 tornillos largos (M3x12) para atornillar la pieza a los servos |
 |
Atornillar la pieza soporte del portapilas la pieza trasera |
 |
Poner junta tórica en la rueda loca |
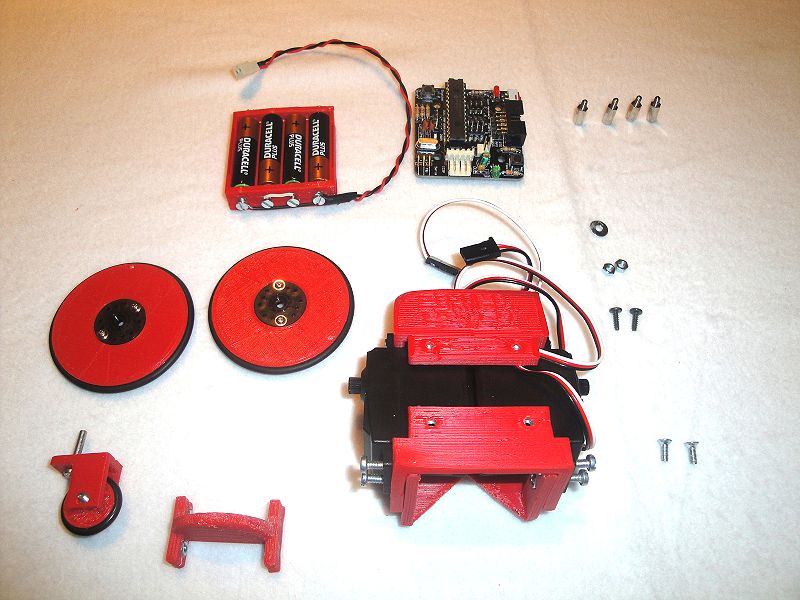 |
Montar la rueda loca sobre la pieza que contiene su eje de giro. Usar dos tornillos M3x12mm |
 |
Atornillar soporte fijo de la rueda loca en la parte trasera |
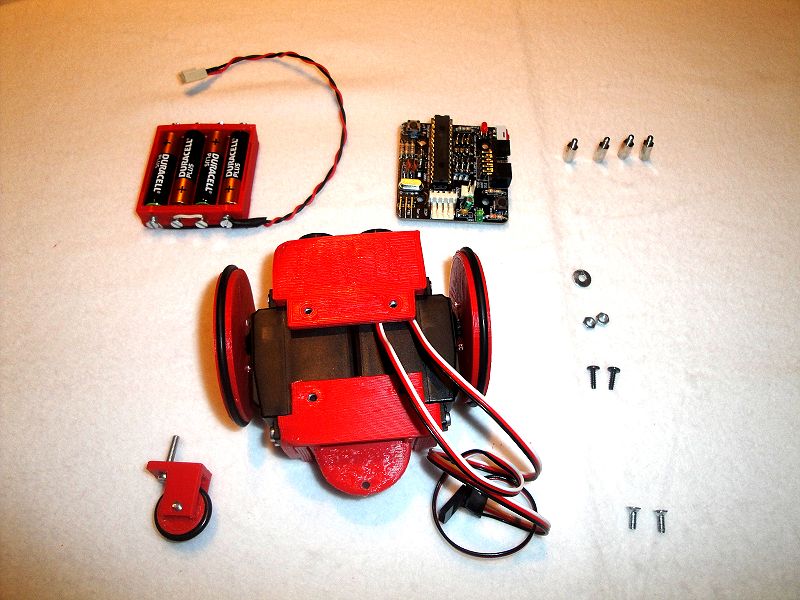 |
Colocar las ruedas en los servos. No atornillarlas todavía |
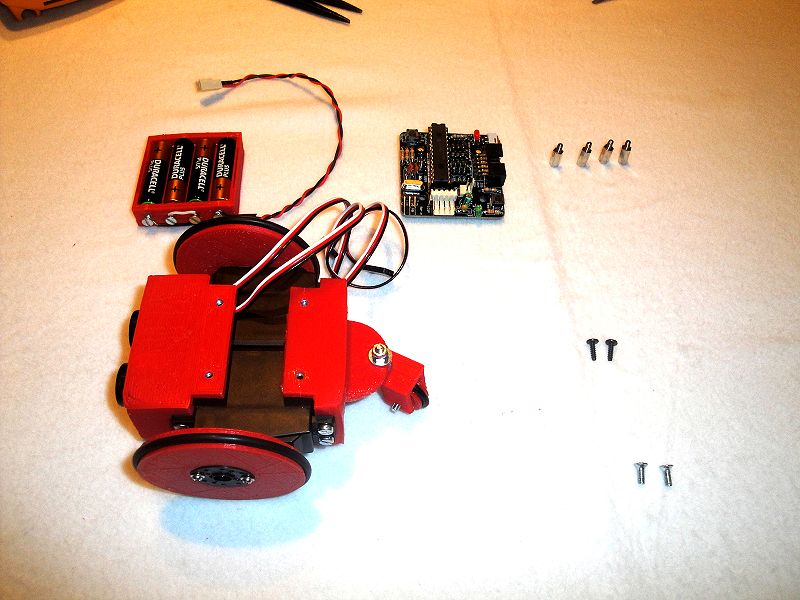 |
Colocar la rueda loca sobre el soporte fijo trasero. Usar una arandela y dos tuercas. No apretar las tuercas mucho para que la rueda loca pueda girar fácilmente |
 |
Poner los separadores macho-hembra en la parte superior del robot. Sacar los cables de los servos como se muestra en la figura |
 |
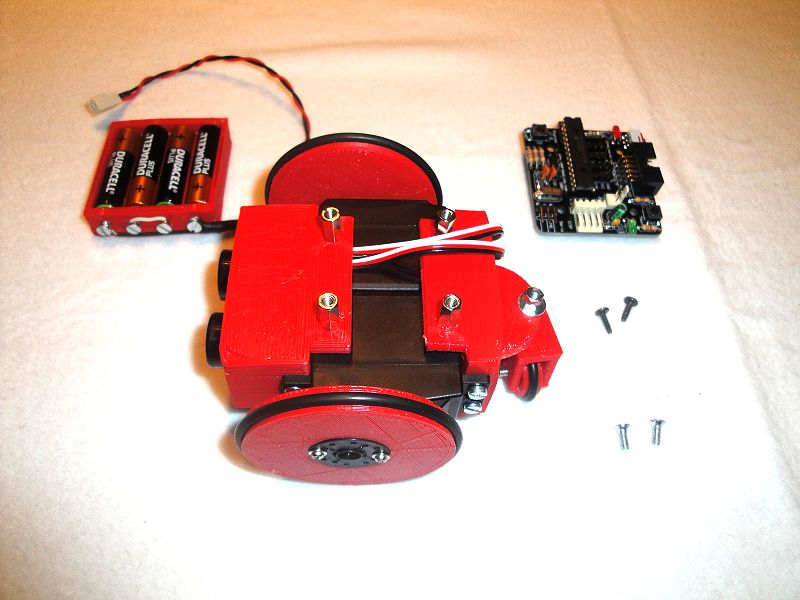
Atornillar la tarjeta Skycube a los separadores, con la orientación mostrada en la figura |
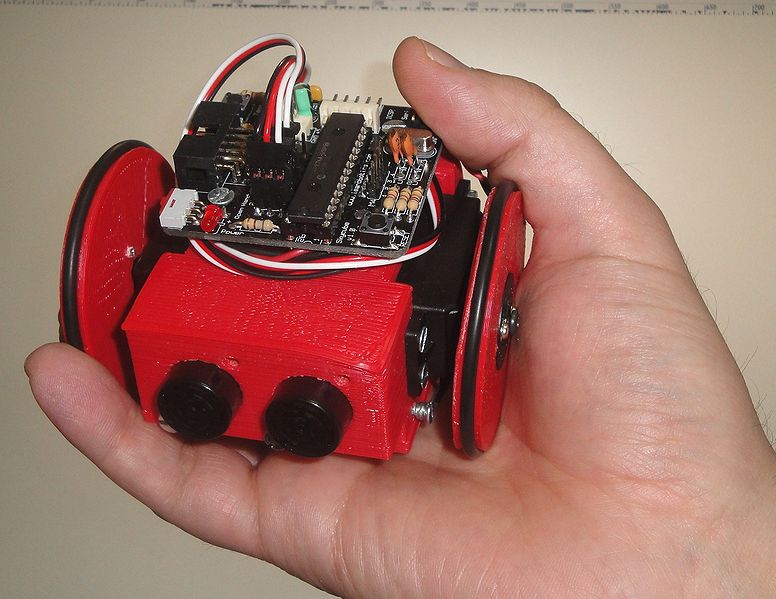 |
Finalizar el robot: atornillar las ruedas al robot, colocar el portapilas y realizar las conexión. |