

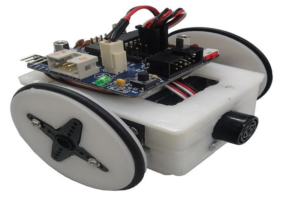

El printbot Miniskybot 2 es la segunda generación de la familia de robots imprimibles Miniskybot. Ha sido financiado y desarrollado dentro del grupo de Robótica y Cibernética de la Universidad Politécnica de Madrid. Las mejoras del robot son:
- Chásis simplificado
- Canica como rueda loca
- Portapilas atornillado al chásis
- Diseño pequeño y compacto
- 3 Tipos de ruedas: para servos con corona circular, de 4 ó 6 brazos
- Compatible con las tarjetas Skymega y Arduino UNO
Materiales
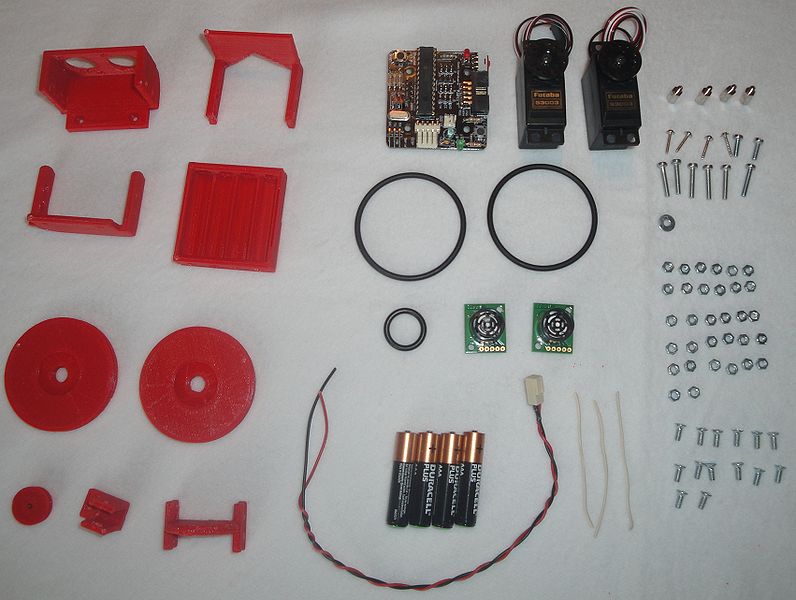
|
|
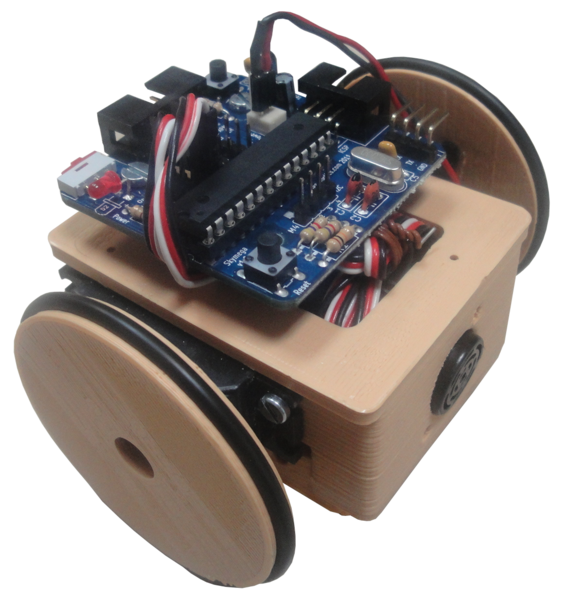
Montaje

| Imagen | Descripción |
|---|---|
 |
Insertar las tuercas en sus correspondientes huecos en las piezas imprimibles. Para ello seguir las instrucciones de las Montaje de las piezas con tuercas empotradas |
 |
Montar las ruedas. Seguir estas instrucciones |
 |
Montar el portapilas. Seguir estas instrucciones |
| Ensamblar y atornillar según la imagen. |
Descargas
 |
 |
|
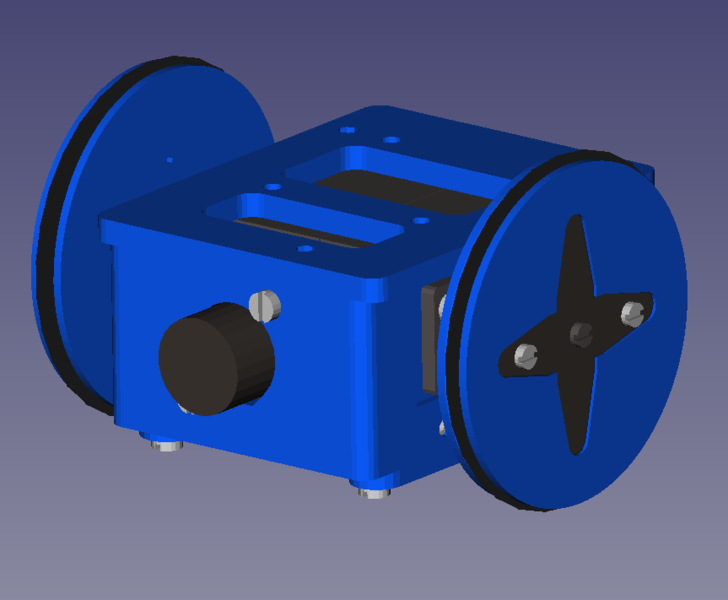
| Fuentes del Miniskybot v2 en Openscad | Robot ensamblado. Fuentes en Freecad | Diagrama de montaje. En Freecad |
|
|
|
| Planos del servo Futaba 3003 (PDF) | Plano del portapilas (PDF) | Plano de las ruedas (PDF) (con corona de 4 brazos) |
|
|
|
| Plano del chásis (PDF) | Planos del miniskybot en svg | Descargar Todo |
Galeria de Imagenes
 |
 |
 |
 |
 |
 |
Galeria de Vídeo
 |
 |
 |
 |
 |
 |