



El ArduCopter es un multirotor basado en Arduino.
Es totalmente abierto, esta basado en una tarjeta de Arduino a la que se le incorpora un shield especialmente diseñado para utilizar con helicopteros, aviones y multirrotores. El chasis es imprimible y el software para controlarlo también es OpenSource.
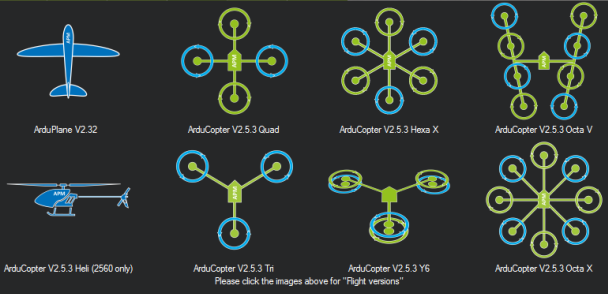
Aquí vamos a centrarnos en el montaje de un cuadricoptero, pero existen muchas más configuraciones:
Materiales
| Imagen | Nombre |
|---|---|
 |
Arandela de Goma Métrica 3 |
 |
Arandela Métrica 3 |
 |
Tuerca de Nylon Métrica 3 |
 |
Tuerca Metalida Métrica 3 |
 |
Tornillo de Plástico 5mm y Métrica 3 |
 |
Tornillo 5mm y Métrica 3 |
 |
Tornillo 25mm y Métrica 3 |
 |
Tornillo 30mm y Métrica 3 |
 |
Separador 8mm y Métrica 3 |
 |
Separador 18mm y Métrica 3 |
 |
Separador 30mm y Métrica 3 |
 |
8 Patas * |
 |
Placa de arriba * |
 |
Placa del APM * |
 |
Placa Inferior * |
 |
Placa Superior * |
 |
Brazos * |
 |
Ardupilo Mega |
 |
IMU Shield |
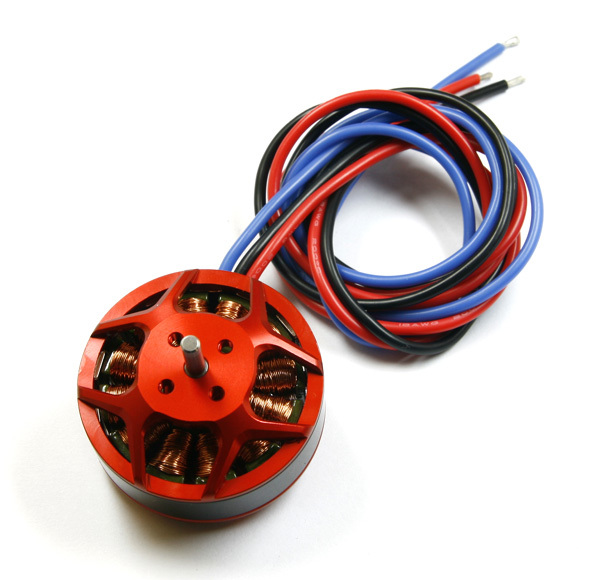 |
4 Motores |
*Existen multitud de chasis imprimibles en thingiverse, otra opción sería utilizar otros materiales que tengamos a mano, lo importante es que sean ligeros. Aquí puedes encontrar los patrones para realizar las piezas
Montaje
Primero vamos a ver los pasos para montar la estructura del multirrotor, despues comentaremos al electronica y por ultimo los accesorios que se le pueden añadir al Arducopter para poder realizar vuelos autónomos
Electrónica
Para controlar el Arducopter necesitamos mínimo dos placas, un Arduino diseñado especialmente para controlar multirrotores y una Shield que contiene los sensores mínimos para permitir la estabilidad y navegación, además de conectores para colocar más sensores.
El Ardupilot

Cómo podemos ver, esta placa contiene dos procesadores, el más grande controla todo lo relacionado con el vuelo. Recibe los datos de los sensores, controla la estabilidad..etc El más pequeño se encarga de las tareas de comunicación con la emisora, el PC..etc
Esta placa modificada de Arduino lleva un Shiel especialmente pensado para utilizar con la arduPilot en montajes voladores y se conoce como IMU
Arducopter
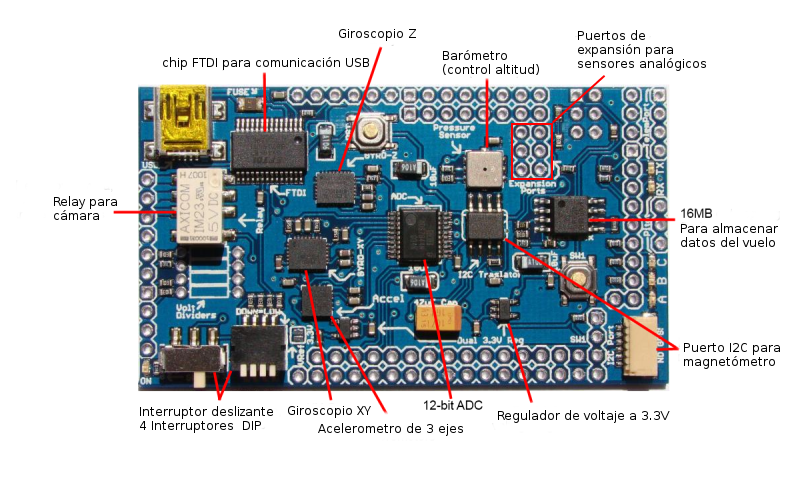
Este Shield contiene algunos sensores básicos para permitir controlar el multirrotor, estos son un acelerometro de 3 ejes,sensor de presión, giroscopio...
También lleva conectores para añadir otros sensores que faciliten la navegación o permitan un vuelo autónomo, como sensor de ultrasonidos (Permite el aterrizaje y despege autónomo y el control de altitud a baja altura), GPS (permite la navegación automática y mantener la posición) magnetometro (Permite la orientación mediante la medición del campo magnético de la tierra, como una brujula), un relay para disparar una cámara de fotos en vuelo, por ejemplo. Además de una memoria flash que permite guardar datos del vuelo (A modo de caja negra.)
Esta es la lista completa de elementos que la componen o que se pueden conectar.:
- 6 Grados de libertad con estabilizadores de control IMU (Unidad de Medición Inercial).
- Girscopio estabilizador de vuelo habiltando modo acrobatico (vueltas mortales).
- GPS para posición en espera (estatico en vuelo).
- Magnetómetro para determinar el frente.(respecto al campo magnético de la tierra).
- Barómetro para el control de altura.
- Control de motores utilizando un control PWM de bajo costo y controladores de velocidad (ESC's)
- telemetría en vuelo capacidad de almacenar datos (caja negra)
- Capacidad de montar un Estabilizador de cámara
- Comandos inalambricos y telemetría a largas distancias
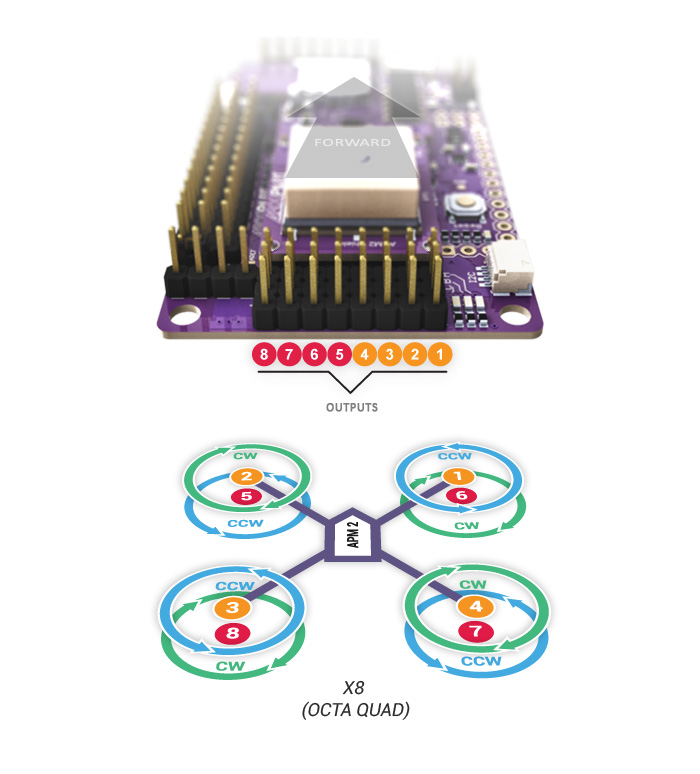
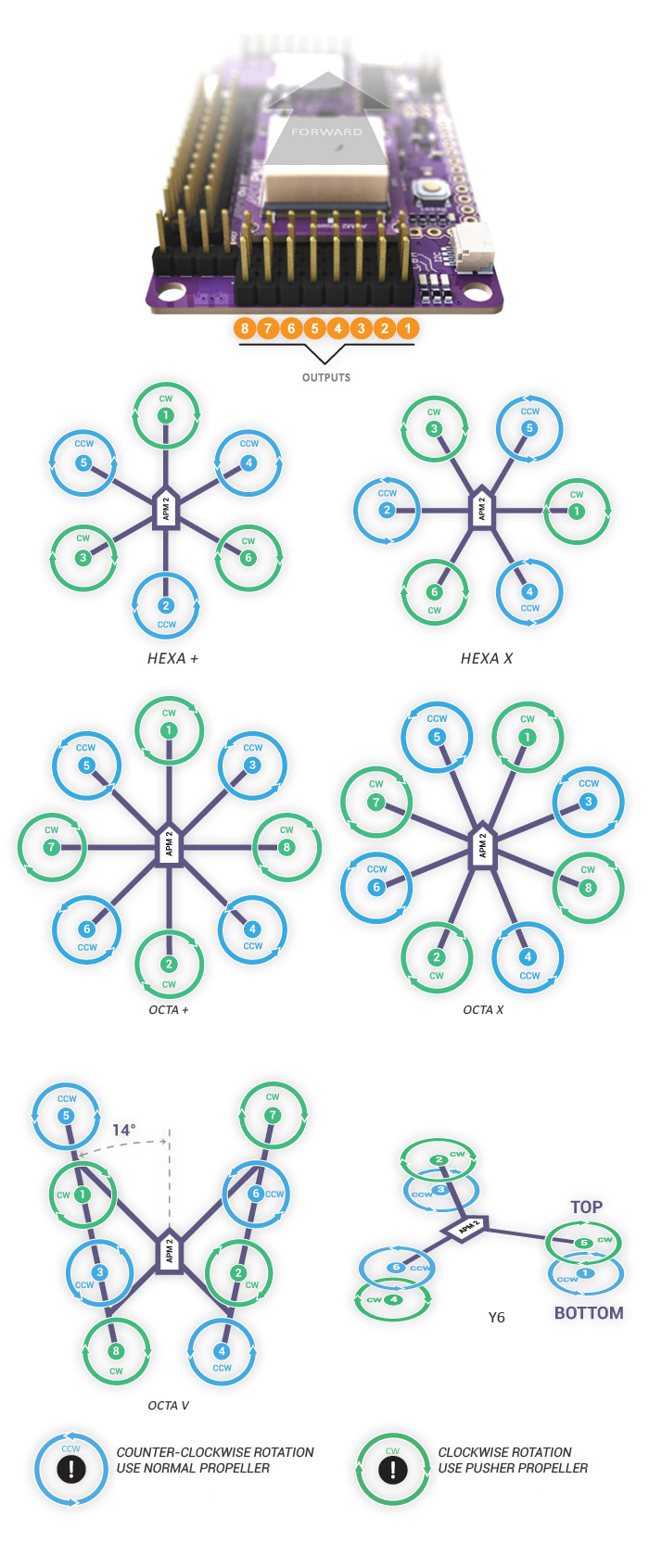
- Capacidad de volar en modo "X" o "+"
- Detector de batería baja.
- Led's configurables por el usuario.
- Capacidad de usar cualquier receptor de Radio control
- Tiempo real gráficas de sensores.
- Interfaz visual para configurar el PID y otros parámetros.
- Integración de sensores infrarrojos para evitar obstáculos.
- Sensor ultrasonico para un aterrizaje automático.
- Puntos de navegación autómatas.
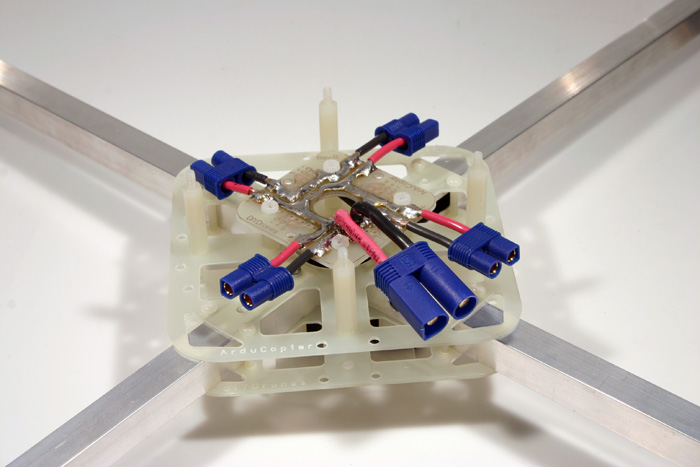
Con estos dos elementos sería suficiente para controlar los motores y hacer volar el multirotor, sin embargo es recomendable contar también con una placa llamada distribuidor de energía que nos permitirá conectar comodamente las baterias.
Conexiones
Dependiendo de cuantos motores vaya a tener nuestro multirotor, utilizaremos unos pines u otros.
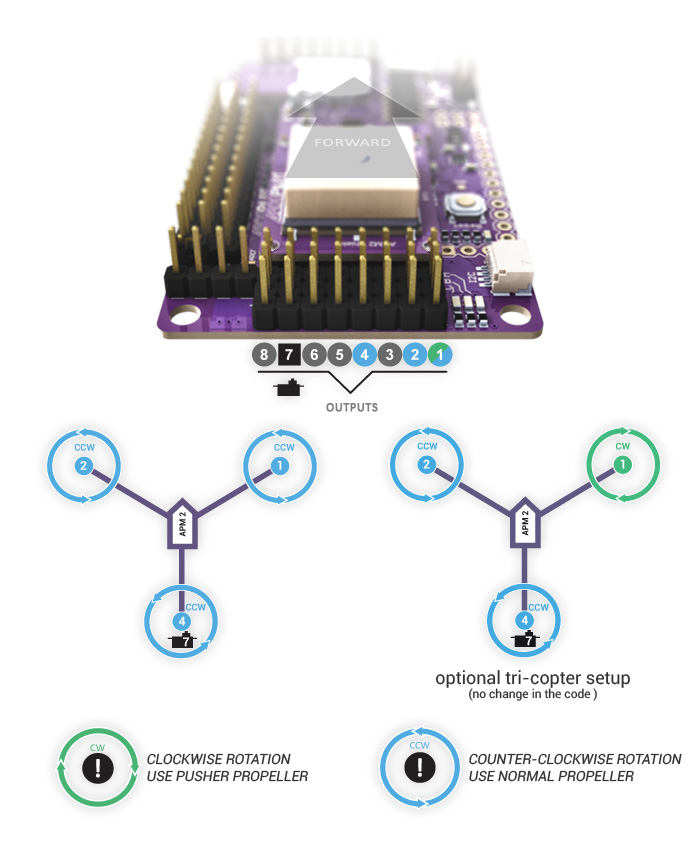
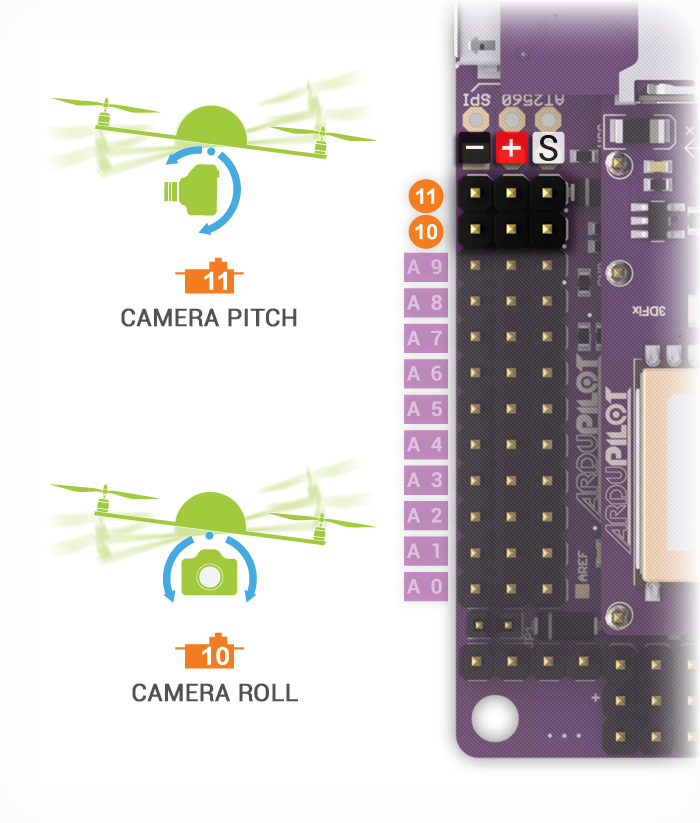
Además, la placa permite colocar un control de estabilidad para una cámara, tanto para su estabilización vertical como para la horizontal
El chasis
| Paso 1 | |
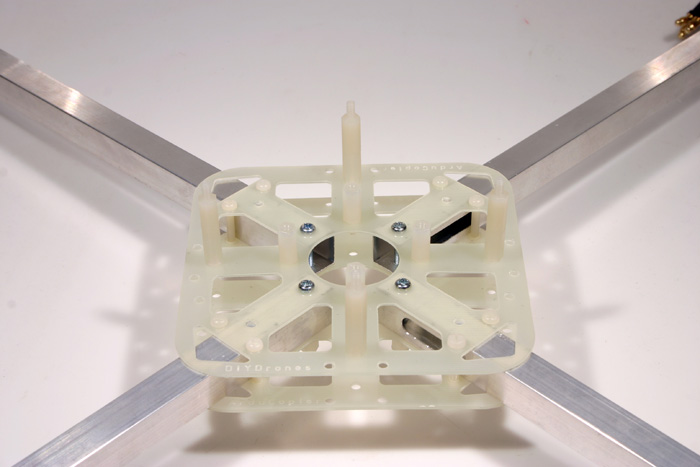
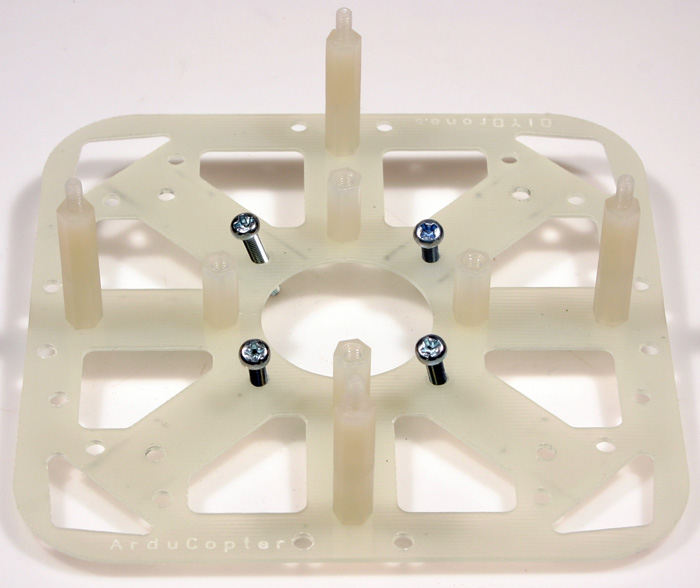 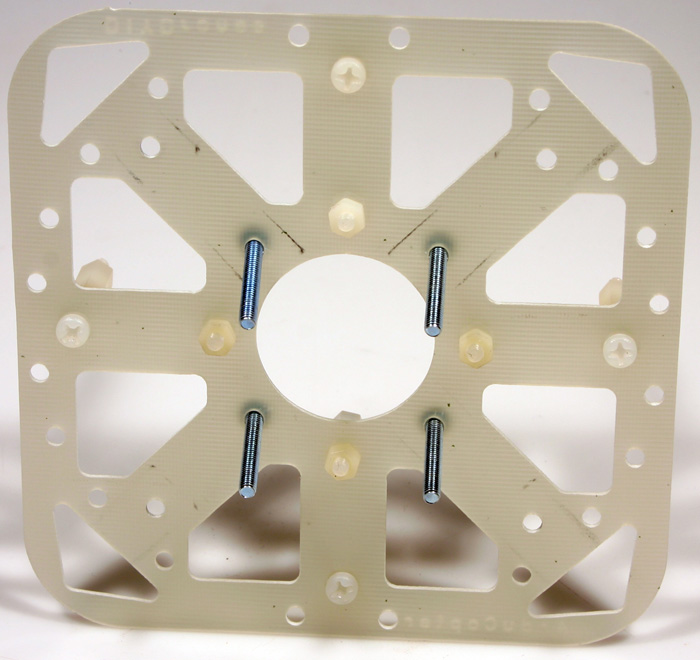 |
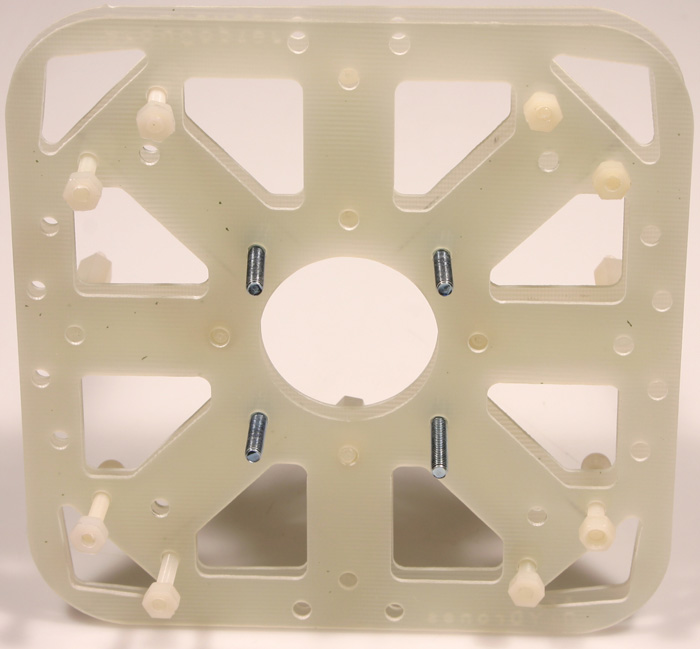
Vamos a empezar por el marco principal,colocaremos los espaciadores de 25mm con los tornillos de plastico de 6mm. Y los tornillos de 20mm. Los espaciadores van uno en cada uno de los agujeros más externos del marco, mientras que los tornillos van en la parte más interna. Es el momento de decidir si queremos una configuración + o X. y en consecuencia colocar los tornillos, ya que serán los que posterimente sujetarán los brazos. Ahora colocaremos los separadores de 12mm las tuercas de nylon. Colocaremos estos separadores en los orificios más internos de la placa (Los que no estan siendo usados por los tornillos) Deben quedar alineados con los separadores que colocamos anteriormente |
| Paso 2 | |
|
Ahora vamos a colocar la segunda de las placas, que ira sobre la anterior. |
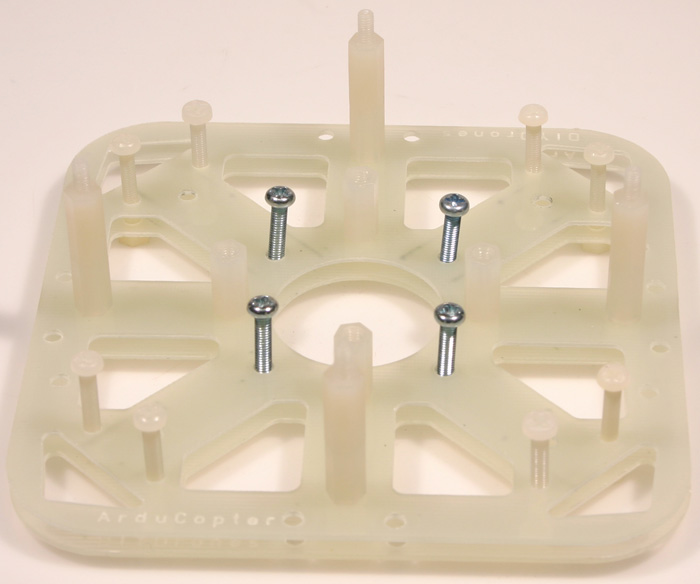 |
Coloque los tornillos de 20mm tal y como se muestra en las imagenes y atornillelos a los separadores de la anterior placa. |
 |
Estas dos placas forman un "sándwich que encierán los brazos del multirrotor |
 |
No apriete aún estos tornillos. |
| Paso 3 | |
 |
Ahora colocaremos los motores en los brazos |
| IMPORTANTE | |
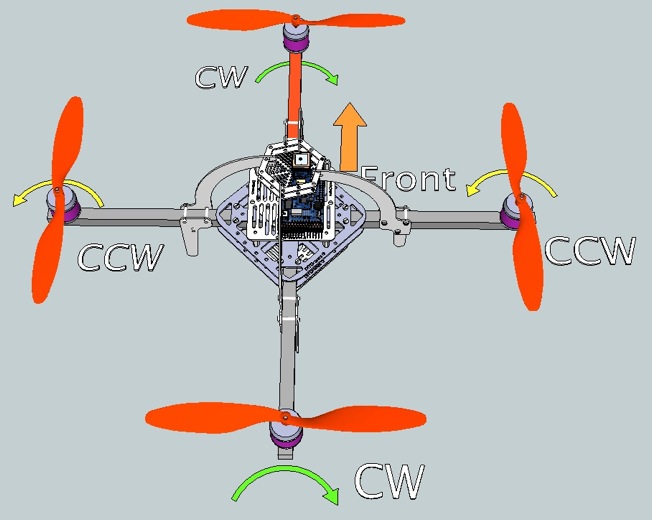 |
|
| Cuando el multirotor avence,este será el sentido de giro de las helices,asegurase de colocar los motores correctamente orientados. | |
| IMPORTANTE | |
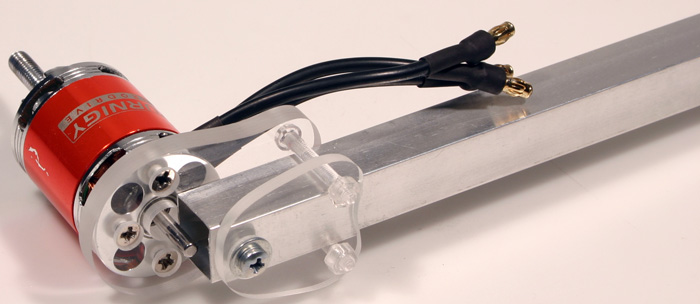 |
Los brazos tienen agujeros en sus estremos, los motores irán atornillados en los que están más cerca del borde del brazo. Atornillaremos los motores en sus soportes y los soportes al brazo utilizando los tornillso metalicos de 25mm. Es importante colocar en cada uno de estos tornillos dos arandelas, una metalica y otra de nylon La arandela metalica evitará el desgaste de las piezas y la de nylon reducirá significativamente el nivel de vibración que pasará a la estructura. |
| Paso 4 | |
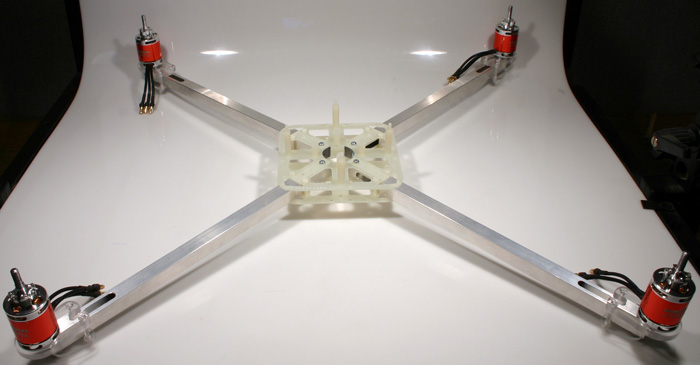 |
Ahora uniremos los brazos a la estructura central. |
 |
Deslice cada brazo de aluminio entre los tornillos que colocamos anteriormente. |
 |
Pase un tornillo de metalico de modo que atraviese la placa superior, el brazo y la placa inferior. aprietelo firmemente co una arandela de goma y una tuerca. |
| Paso 5 | |
 |
Ahora fijaremos el soporte para la bateria. Lo primero será pasar una cinta de velcro por las ranuras de las pieza (Estas cintas se pueden encontrar facilmente en mercerias y grandes almacenes.) |
 |
Con esta cinta podremos asegurar la bateria del ArduCompter y evitar que se mueva durante el vuelo. |
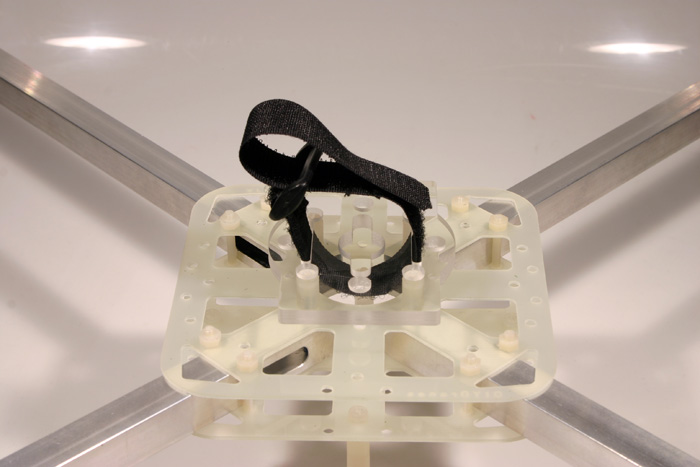 |
Atornillamos esta pieza a la pieza superior de la estructura que ya tenemos montada |
 |
Deberá quedar colocada igual que en la imagen |
| Paso 6 | |
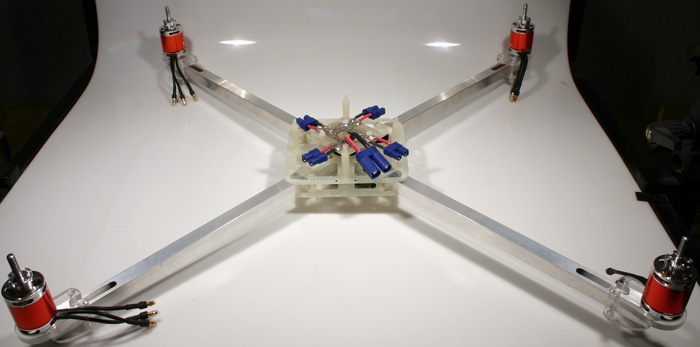 |
Para simplificar las conexiones y permitir colocar y sacar la bateria de forma rápida (para cargarla o sustituirla por otra y seguir volando.) colocaremos una PCB muy simple llamada "Placa de distribucion de Energia" A esta placa conectaremos los componentes del Arducopter y lo que es más importante, llevará una pequeña alarma de descarga de la bateria. Esto tiene dos funciones muy importantes por un lado avisarnos para aterrizar antes de que la batería se agote y el ArduCopter se estrelle y para evitar daños en la batería, ya que las de este tipo se estropean si llegasen a descargarse demasiado. |
 |
Simplemente tenemos que atornillar la PCB al soporte de la bateria que hemos colocado. |
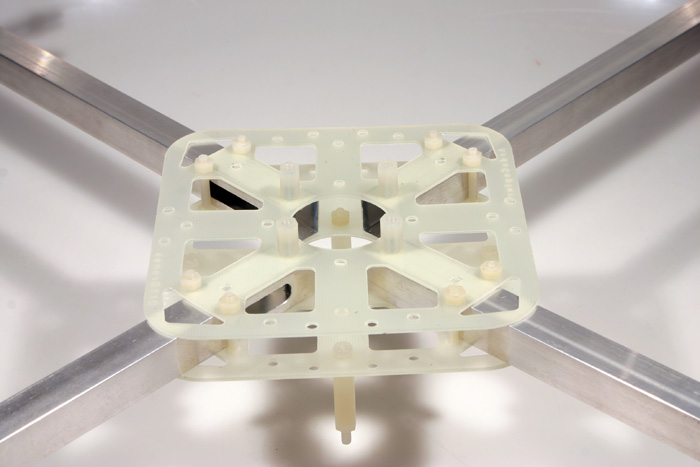
| Paso 7 | |
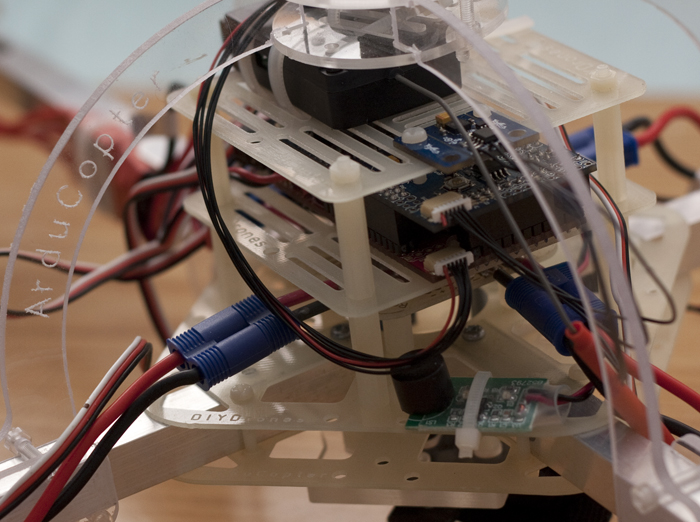 |
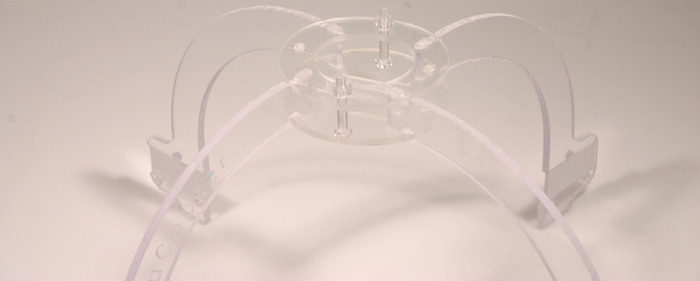
Ahora viene el turno del soporte para el Ardupilot Mega y su shield. Son dos placas iguales que van una sobre la otra separadas por un separador de 25mm y montadas sobre los separados de la estructura anterior, en angulo de 45 grados. En la imagen se puede apreciar cómo queda |
| Paso 8 | |
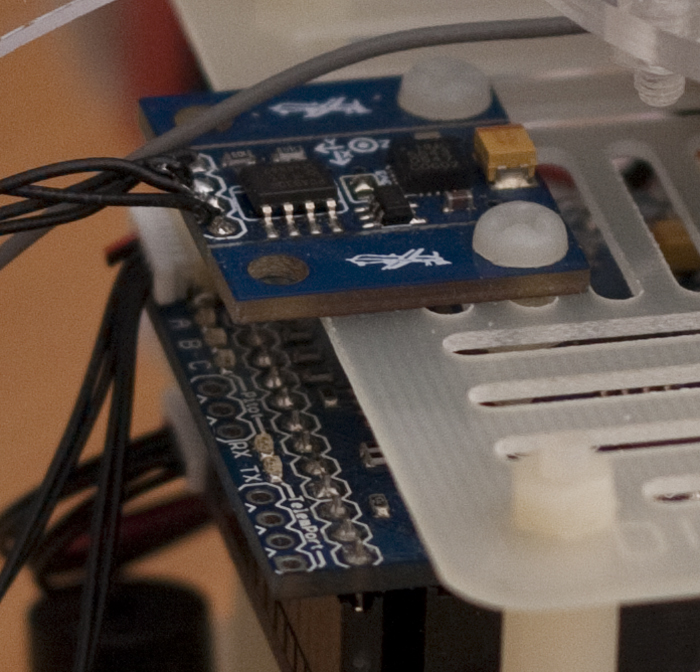 |
Si vamos a poner un magnetómetro este va atornillado sobre la placa más alta que tenemos montada hasta el momento. |
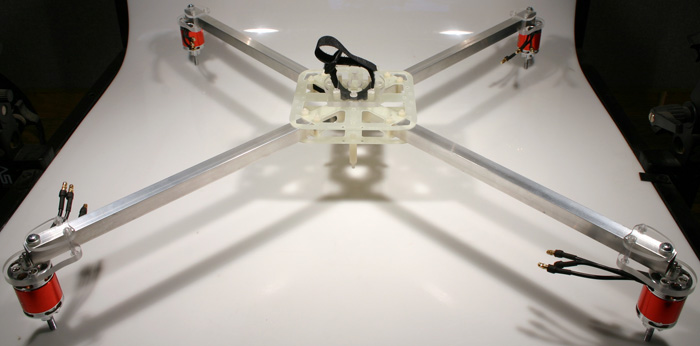
| Paso 9 | |
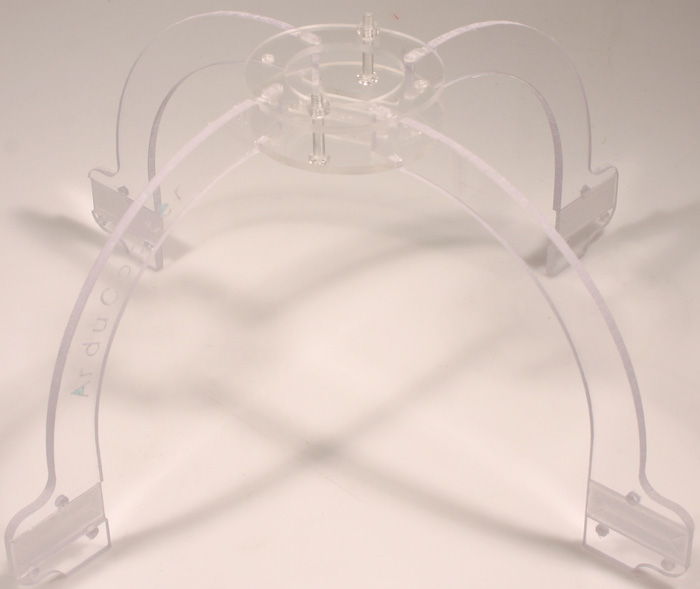 |
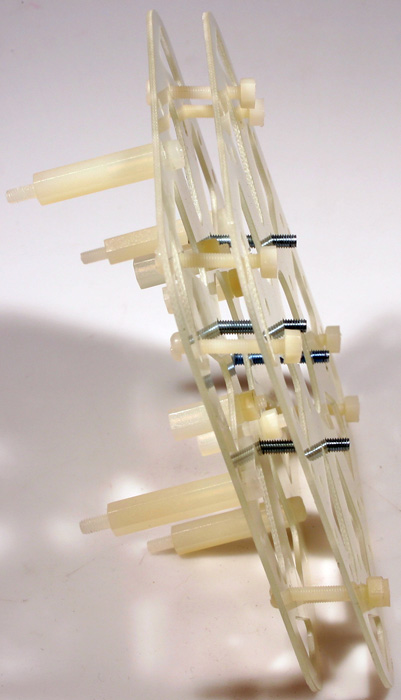
Ya vamos llegando al final, ahora toca colocar las patas sobre las que aterrizará el ArduCoptero. En este modelo forma también una estructura que engloba todas las anteriores. se sujeta a los brazos mediante tornillos de 20mm y por los mismos amarres se colocan las patas. |
 |
|
| Paso 10 | |
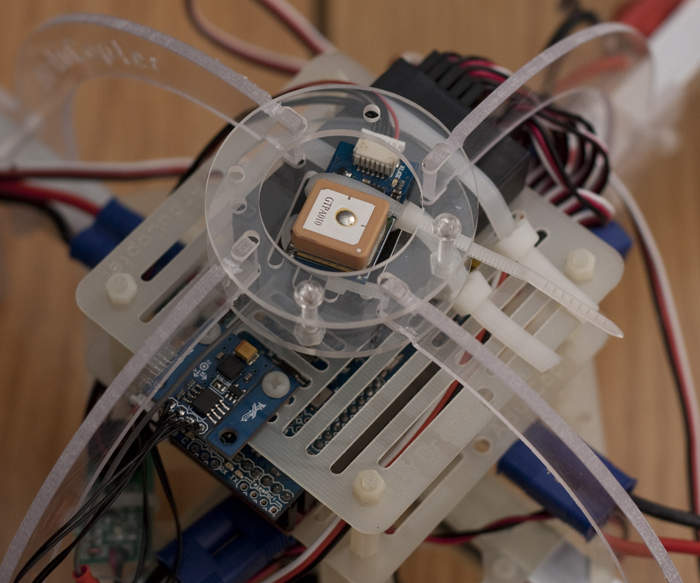 |
Si nuestro ArduCopter va a tener GPS la antena se debe colocar en la parte superior tal y como se ve en la imagen, de forma que siempre tenga el cielo abierto encima y la recepción sea optima. |
| Paso 11 | |
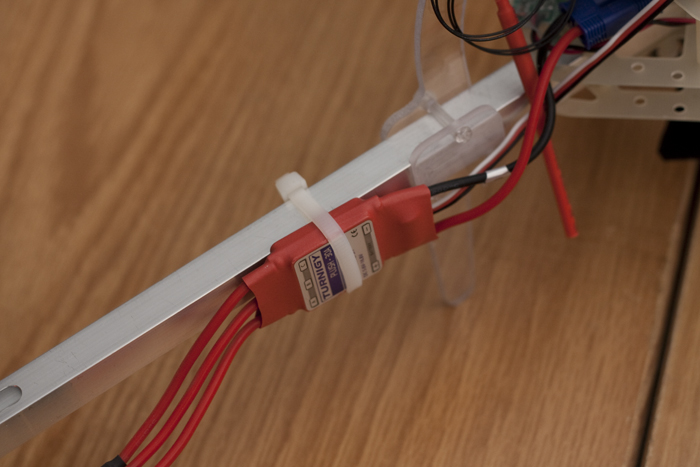 |
La estructura ya esta lista, ahora hay que colocar los cables de forma que nada quede suelto ni colgando y todos los componentes formen una estructura compacta. Esto puede hacerse con bridas para asegurarnos que nada se soltará durante el vuelo. |
Software
Hay un programa muy intenresante para controlar un Arducopter,desde él podemos ontrolar el vuelo, programar un vuelo automatico o leer el estado de los sensores.

El programa se llama Arducopter y como se puede apreciar en las imágenes, es de lo más completo.

Además este programa permite realizar simulaciones de los vuelos, de esta forma podemos asegurarnos de haber realizado la programación correctamente antes de cargarlo en el multirotor.
Descargas
 |
 |
|
| Ficheros EAGLE del Ardupilot | Esquemas de Ardupilot | Firmware del Ardupilot |
Galeria de Imagenes
 |
 |
 |
 |
 |
 |
Galeria de Vídeo
 |
 |
 |
 |
 |
 |