

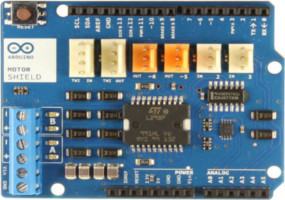

EL Shield de motores de Arduino se basa en el integrado L298 (datasheet o el tutorial de Trastejant), que cuenta con dos puentes H, lo que permite activar relés, motores de corriente continua, solenoides y motores de paso a paso. Este controlador permite controlar dos motores de corriente continua con Arduino. Controlando la velocidad y dirección de cada uno de ellos de forma independiente. Puede controlarse la energía que consume cada motor, entre otras cosas. El shield es compatible con TinkerKit, lo que significa que puedes crear proyector rápidamente conectando módulos TinkerKit a la placa.
| Resumen | |
|---|---|
| Voltaje de operación | 5V o 12V |
| Controlador de motores | L298P, controlador de dos motores de corriente continua o un motor paso a paso. |
| Corriente máxima | 2A por canal, 4A como máximo. (Con una fuente de energía externa) |
| Detección de corriente. | 1,65V/A |
| Funciones de parada y freno. | |
Esquemas y Diseños
ficheros Eagle :arduino_MotorShield_Rev3-reference-design.zip
Esquemáticos: arduino_MotorShield_Rev3-schematic.pdf
Alimentación
El Shield para Motores de Arduino debe ser alimentado solo por una fuente de alimentación externa. El L298 posee dos conexiones de alimentación, una para el funcionamiento del chip y otra para alimentar los motores. Por lo general el consumo de los motores supera el máximo que el USB puede entregar.
Para la alimentación externa (no por USB) puede usarse un transformador de AC/DC o baterías. El adaptadores debe estar conectado a un plugging de 2.1mm con el positivo en el centro que se introduce en el Jack de alimentación o conectando y atornillando los cables en sus correspondiente entrada teniendo cuidado de respete las polaridades.
Para evitar un posible daño a la placa de Arduino cuando cundo el shield esta montado es recomendable utilizar un voltaje de entre 7 y 12 V. Si tu motor requiere más de 9V es recomendable separar la alimentación de Arduino de la del shield. Esto es posible utilizando el jumper Vin Connect situado en la parte trasera del shield. El voltaje máximo de Vin es de 18V.
Los pines de alimentación son:
- Vin: En un conector con tornillos, es el voltaje de entrada para el motor conectado al shield. Una fuente de alimentación externa conectada a este pin proporciona energía a la placa de Ardunio en la que esta montada el Shield. Puede retirar el jumper Vin Connect para dedicar toda la potencia al motor.
- GND: terminal de tierra.
El shield puede soportar 2 amperios por canal hasta un máximo de 4 amperios.
Entradas y salidas
El Shield tiene dos canales separados a los que llamaremos A y B. Estos usan 4 pines de arduino para cada motor. En total 8 pines son usados por este shield. Puede usar cada canal por separado para controlar dos motores de corriente continua o combinarlos para controlar un motor de paso a paso.
Los pines del shield divididos por canales responden a la siguiente tabla:
| Función | Pin para el canal A | Pin para el canal B |
|---|---|---|
| Dirección | D12 | D13 |
| PWM | D3 | D11 |
| Freno | D9 | D8 |
| Detección de corriente | A0 | A1 |
Si usted no necesita freno o detección de corriente pero si más pines disponibles para su aplicación puede deshabilitar estas opciones utilizando los correspondientes jumpers ubicados en la parte trasera de la shield
El resto de conectores del shield:
- Screw terminal: Para conectar los motores y su alimentación.
- 2 conectores TinkerKit Para dos entradas analógicas (conectores blancos) conectados a A2 y A3 de Arduino.
- 2 conectores TinkerKit Para dos salidas analógicas(conectores naranjas) conectados a dos salidas PWM de Arduino (D5 y D6 )
- 2 conectores TinkerKit para la interfaz TWI (Conectores blancos de cuatro pines.) Uno de entrada y otro de salida (Especificado en la serigrafia.)
Conexión de motores
Motor de Corriente continua con escobillas (Brushed DC): Puede controlar hasta dos motores de corriente continua conectando los terminales en los terminales (+) y (-) de cada canal. De esta forma puede controlar la dirección mandando un pulso alto o bajo a los pines DIR A y DIR B. Puede controlar la velocidad variado el PWM A y el PWM B. Los pines de freno A y B funcionan cuando la salida esta en alto.
Se puede medir la corriente que esta pasando por un motor en un determinado momento leyendo los pines SNS0 y SNS1. Que envían un valor proporcional a la corriente que esta pasando. Estas entradas pueden leerse como una entrada analógica normal utilizando la función analogRead() en las entradas analógicas A0 y A1. Para mayor comodidad están calibradas para entregar 3.3V cuando el shiel entrega la tensión máxima (2A).
Características Físicas
El tamaño máximo de shiel de motores es de 2.7 x 2.1 pulgadas. Cuatro agujeros para tornillos permiten dejarla fijada a cualquier superficie.
Nota: La distancia entre los pines 7 y 0 es de 160 milésimas de pulgada, no un múltiplo de 100milesimas de pulgada como en el resto de los pines.